1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
| /*
* Application.cpp
*
* Copyright 2021 Akihiro Yamamoto.
* Licensed under the Apache License, Version 2.0
* <https://spdx.org/licenses/Apache-2.0.html>
*
*/
#include "main.h"
#include <ST7032iLcd.hpp>
#include <array>
#include <cmath>
extern I2C_HandleTypeDef hi2c1;
extern TIM_HandleTypeDef htim2;
static ST7032iLcd i2c_lcd(hi2c1);
using ExcitingACBD = uint8_t;
constexpr const ExcitingACBD ExA = 0b1000;
constexpr const ExcitingACBD ExC = 0b0100;
constexpr const ExcitingACBD ExB = 0b0010;
constexpr const ExcitingACBD ExD = 0b0001;
using HiACBDLoACBD = uint8_t;
static inline HiACBDLoACBD fromExcitingACBD(ExcitingACBD acbd) {
return (acbd & 0xf) << 4 | (acbd & 0xf);
}
//
static inline void excitingCoil(HiACBDLoACBD hiloACBD) {
uint32_t odr = GPIOA->ODR;
if ((odr & 0xff) != hiloACBD) {
GPIOA->BSRR = (~hiloACBD & 0xff) << 16;
// clang-format off
asm("NOP");asm("NOP");asm("NOP");asm("NOP");asm("NOP");
asm("NOP");asm("NOP");asm("NOP");asm("NOP");asm("NOP");
// 10
asm("NOP");asm("NOP");asm("NOP");asm("NOP");asm("NOP");
asm("NOP");asm("NOP");asm("NOP");asm("NOP");asm("NOP");
// 20
// clang-format on
GPIOA->BSRR = hiloACBD & 0xff;
}
}
// turn off all transistor
static inline void turnOffAll() { GPIOA->BSRR = 0xff << 16; }
// short brake = turn ON all lower side switch.
static inline void shortBrake() { excitingCoil(0b00001111); }
// Low A (PA0)
static inline void turnOnLowA() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET);
}
static inline void turnOffLowA() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET);
}
// Low C (PA1)
static inline void turnOnLowC() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);
}
static inline void turnOffLowC() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);
}
// Low B (PA2)
static inline void turnOnLowB() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_SET);
}
static inline void turnOffLowB() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_RESET);
}
// Low D (PA3)
static inline void turnOnLowD() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
}
static inline void turnOffLowD() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
}
// High A (PA4)
static inline void turnOnHighA() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
}
static inline void turnOffHighA() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
}
// High C (PA5)
static inline void turnOnHighC() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
}
static inline void turnOffHighC() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
}
// High B (PA6)
static inline void turnOnHighB() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_SET);
}
static inline void turnOffHighB() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_RESET);
}
// High D (PA7)
static inline void turnOnHighD() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
}
static inline void turnOffHighD() {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
}
enum class Rotation : int8_t { CW = 1, CCW = -1 };
// Wave drive (one phase on)
static inline int32_t waveDrive(int32_t steps, Rotation r) {
constexpr static const std::array<ExcitingACBD, 4> pulses{
ExA, // A
ExB, // B
ExC, // C
ExD, // D
};
uint32_t x = (pulses.size() + (steps & 3)) & 3;
excitingCoil(fromExcitingACBD(pulses[x]));
return steps + static_cast<int32_t>(r);
}
// Full-step drive (two phases on)
static inline int32_t fullStepDrive(int32_t steps, Rotation r) {
constexpr static const std::array<ExcitingACBD, 4> pulses{
ExA | ExB, // AB
ExB | ExC, // BC
ExC | ExD, // CD
ExD | ExA, // DA
};
uint32_t x = (pulses.size() + (steps & 3)) & 3;
excitingCoil(fromExcitingACBD(pulses[x]));
return steps + static_cast<int32_t>(r);
}
// Half-step drive
static inline int32_t halfStepDrive(int32_t steps, Rotation r) {
constexpr static const std::array<ExcitingACBD, 8> pulses{
ExA, // A
ExA | ExB, // AB
ExB, // B
ExB | ExC, // BC
ExC, // C
ExC | ExD, // CD
ExD, // D
ExD | ExA, // DA
};
uint32_t x = (pulses.size() + (steps & 7)) & 7;
excitingCoil(fromExcitingACBD(pulses[x]));
return steps + static_cast<int32_t>(r);
}
extern "C" void application_setup() {
HAL_Delay(300); // time wait for LCD prepare
shortBrake();
//
i2c_lcd.init();
std::string buff(50, ' ');
std::snprintf(buff.data(), buff.size(), u8"ステッピングモーター テスト");
i2c_lcd.setDdramAddress(0);
i2c_lcd.putString(buff);
//
HAL_TIM_Base_Start_IT(&htim2);
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 1000;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);
}
static volatile int32_t stepCounter = 0;
static volatile Rotation rotation = Rotation::CW;
constexpr static const int32_t RightAngle = 400 / 2;
static void showPosition() {
std::string buff(50, ' ');
switch (rotation) {
case Rotation::CW:
std::snprintf(buff.data(), buff.size(), "CW %+5ld pulses", stepCounter);
break;
case Rotation::CCW:
std::snprintf(buff.data(), buff.size(), "CCW %+5ld pulses", stepCounter);
break;
}
i2c_lcd.setDdramAddress(0x40);
i2c_lcd.putString(buff);
}
typedef void (*Procedure)();
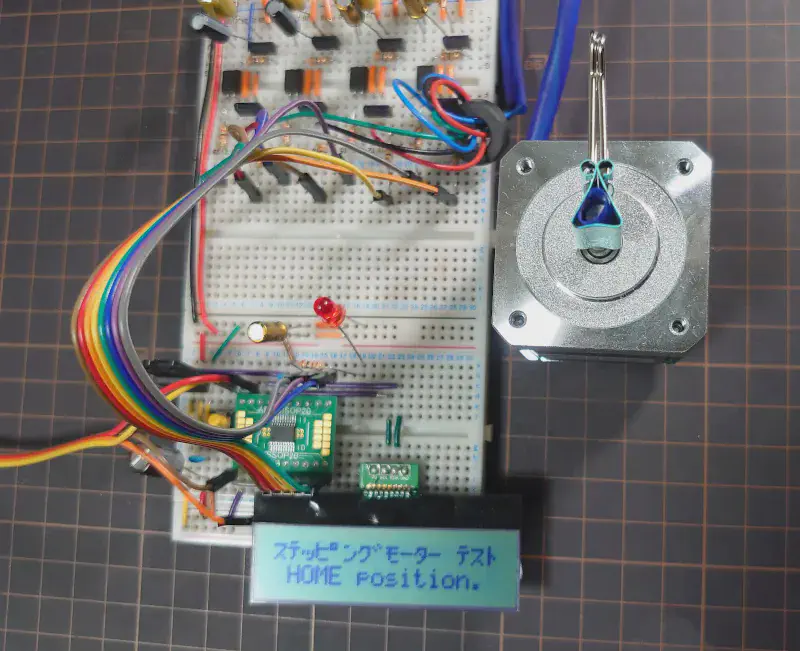
static void procHomePosition() {
i2c_lcd.setDdramAddress(0x40);
i2c_lcd.puts(u8" HOME position. ");
HAL_Delay(1000);
HAL_TIM_Base_Start_IT(&htim2);
}
static void procStopPosition() {
showPosition();
HAL_Delay(1000);
HAL_TIM_Base_Start_IT(&htim2);
}
static void procReturnPosition() {
rotation = (rotation == Rotation::CW) ? Rotation::CCW : Rotation::CW;
showPosition();
HAL_Delay(1000);
HAL_TIM_Base_Start_IT(&htim2);
}
static Procedure getProcedure(int32_t counter) {
switch (std::abs(counter)) {
case 0 * RightAngle: // home position
return procHomePosition;
case 1 * RightAngle: // 90
return procStopPosition;
case 2 * RightAngle: // 180
case 3 * RightAngle: // 270
case 4 * RightAngle: // 360
case 5 * RightAngle: // 450
case 6 * RightAngle: // 540
case 7 * RightAngle: // 630
case 8 * RightAngle: // 720
case 9 * RightAngle: // 810
return nullptr;
case 10 * RightAngle: // 900
return procReturnPosition;
default:
return nullptr;
}
}
extern "C" void application_loop() {
if (Procedure p = getProcedure(stepCounter); p != nullptr) {
(*p)();
} else {
showPosition();
HAL_Delay(1);
}
}
extern "C" void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == htim2.Instance) {
stepCounter = halfStepDrive(stepCounter, rotation);
if (getProcedure(stepCounter) != nullptr) {
HAL_TIM_Base_Stop_IT(&htim2);
}
}
}
|
出典 : LCDデータシート(参考資料)
出典: https://techweb.rohm.co.jp/motor/knowledge/basics/basics-04/496
出典: https://techweb.rohm.co.jp/motor/knowledge/basics/basics-04/499
出典: https://techweb.rohm.co.jp/motor/knowledge/basics/basics-03/362